
Problem:
Despite the numerous players and success in driverless technologies, there remains no good platform for academic researchers who want to develop technologies for this application but have no way of testing them in a complete system. The competitive and fast-paced nature of the race towards self-driving vehicles has effectively kept most academic researchers at arms-length from the cutting edge. Autonomous Vehicle(AV) software stacks are proprietary and the few projects that aim to be open-source are either still in development or aim to bring a commercially competitive solution to market. What is lacking is a robust and easy-to-adopt/maintain /run AV stack that researchers can employ to test new technologies that might advance what is possible for self-driving vehicles.
Solution:
Nova is the applied self-driving arm of Dr. Ruth's research in the Applied Systems Lab. The Nova project is composed of an entirely undergraduate team to develop and refine our in-house ROS(Robot Operating System) -based AV software stack. Our ongoing development targets building out core driverless algorithms in a simple and modular way such that reseachers who use our platform can swap out, rewrite, or add new components to evaluate their own, for example, sensing technologies, algorithms, or hardware.
Technology Readiness:
Level 6
Technologies:
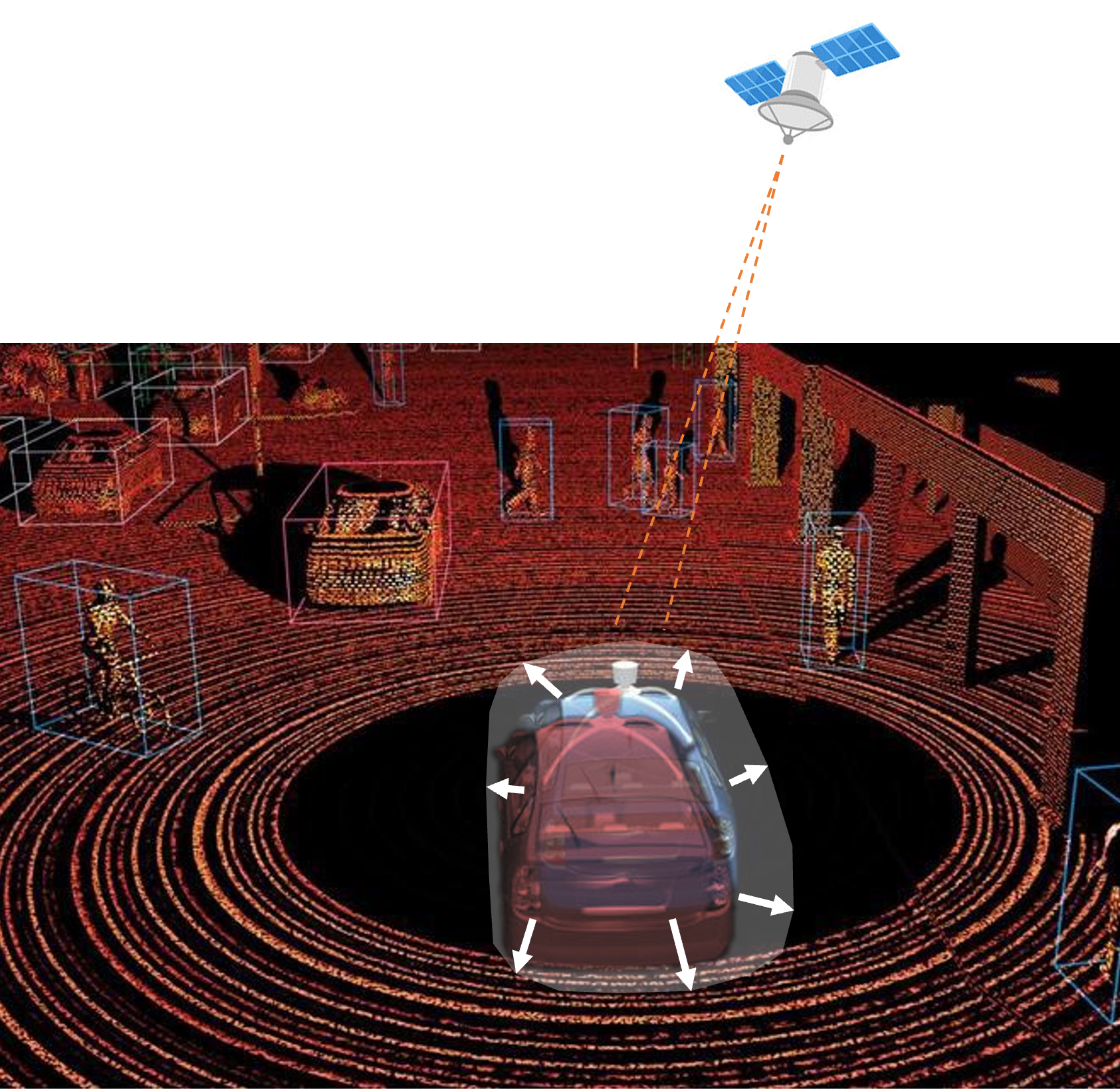
Video/LIDAR/IMU/GNSS sensing, machine learning perception algorithms, behavior planning, control

Project Website:
https://nova-utd.github.io/